-
第一组 多智能体系统
普通类 -
- 支持
- 批判
- 提问
- 解释
- 补充
- 删除
-
-
智能体定义
产业界给出了对智能体的一般定义。例如,IBM公司认为“智能体是一个软件实体,其可以代表一个人类用户或者其他程序。智能体具有一个行为集合,且具有某种程度的独立性或者白主性。智能体在采取行为时,通常使用某些知识来表示用户的目标或者期望”
智能体在某种程度上属于人工智能研究范
畴,因此要想给智能体下一个确切的定义就
如同给人工智能下一个确切的定义一样困难。在分布式人工智能和分布式计算领域争论了很多年,也没有一个统一的认识。
研究人员从不同的角度给出了智能体的定
义,常见的主要有以下几种:
(1 FIPA ( Foundation forlntelligent
Physical 智能体),一个致力于智能体技术
标准化的组织给智能体下的定义是:“智能体
是驻留于环境中的实体,它可以解释从环境中获得的反映环境中所发生事件的数据,并执行对环境产生影响的行动。〞在这个定义中,智能体被看作是一种在环境中“生存”的实体,它既可以是硬件(如机器人),也可以
是软件。
(2) 著名智能体理论研究学者wooldridge博士等在讨论智能体时,则提出"弱定义"和“强
定义”二种定义方法:弱定义智能体是指具有自主 性、社会性、反应性和能动性等基本特性的智能体;强定义智能体是指不仅具有弱定义中的基本特性,而且具有移动性、通信能力、理性或其它特性的智能体;
(3) Franklin和 Graesser则把智能体描述为
“智能体是一个处于环境之中并且作为这个环境一部分的系统,它随时可以感测环境并且
执行相应的动作,同时逐渐建立自己的活动规划以应付末来可能感测到的环境变化”;
(4) 著名人工智能学者、美国斯坦福大学的
Hayes-Roth认人为“智能体能够持续执行三项功能:感知环境中的动态条件;执行动作影响环境条件;进行推理以解释感知信息、求解
问题、产生推断和决定动作”;
(5) 智能体研究的先行者之一
,美国的
Macs则认为“自治或自主智能体是指那些宿主
手复杂动态环境中,自治地感知环境信息,自主采取行动,并实现一系列预先设定的目标或任务的计算系统”。
[1-3]
-
智能体的具体结构
智能体的具体结构可以因应用领域和设计需求而异,但通常包括以下几个部分:
1.感知模块:用于感知环境信息,例如传感器、摄像头、麦克风等。
2.决策模块:用于制定目标和计划,例如决策树、神经网络、模糊逻辑等。
3.执行模块:用于执行任务,例如机器人手臂、电机、驱动器等。
4.通信模块:用于与其他智能体或人类进行通信,例如无线网络、蓝牙、RFID 等。
5.学习模块:用于学习知识和改进性能,例如机器学习、深度学习、强化学习等。
这些模块可以通过硬件、软件或两者的组合来实现,具体结构取决于应用领域和设计需求。
所谓的Agent,在信息技术尤其是人工智能和计算机领域,可以看作是能够通过传感器感知其环境,并借助于执行器作用于该环境的任何事物。智能体的算法与模型是构建其智能行为的核心。这些算法和模型不仅决定了智能体如何感知和理解环境,还指导它们如何做出决策和采取行动。在智能体的算法中,机器学习扮演着至关重要的角色。通过训练和优化,机器学习算法使智能体能够从数据中学习并改进其性能。例如,深度学习算法,特别是神经网络,已被广泛应用于图像识别、语音识别和自然语言处理等领域。这些算法使智能体能够处理复杂的模式和数据,从而实现更高级别的智能行为。
在模型方面,智能体通常使用基于概率的模型来描述其不确定性和决策过程。这些模型允许智能体在不确定的环境中做出最优决策,同时考虑到各种可能的结果和风险。例如,马尔可夫决策过程(MDP)是一种常用的模型,用于描述智能体在环境中的行为和决策过程。通过优化MDP模型,智能体可以学习如何在给定状态下选择最佳行动,以实现长期回报的最大化。
此外,强化学习算法在智能体的决策过程中发挥着关键作用。强化学习是一种通过试错来学习最优决策策略的方法。智能体通过与环境的交互来收集奖励和惩罚信号,并根据这些信号调整其决策策略。例如,AlphaGo等先进的人工智能系统就采用了强化学习算法来优化其围棋决策策略。这些算法使智能体能够在复杂的游戏和决策任务中超越人类水平。
智能体的算法与模型是实现其智能行为的关键。通过不断的研究和创新,我们可以期待智能体在未来能够展现出更高级别的智能和性能。
-
多智能体学习
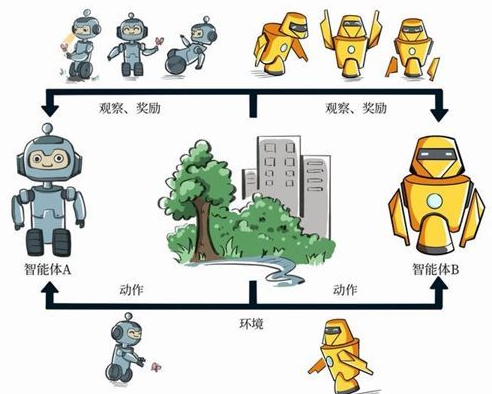
多智能体学习是指多个智能体通过相互协作和竞争来学习和改进自己的性能。多智能体学习可以分为集中式学习和分布式学习两种方式。
集中式学习是指所有智能体将自己的信息发送给一个中央控制器,由中央控制器进行学习和决策。这种方式的优点是可以实现全局最优决策,但缺点是需要中央控制器具有较高的计算能力和通信能力。
分布式学习是指每个智能体通过与其他智能体进行交互来学习和改进自己的性能。这种方式的优点是可以降低对中央控制器的依赖,但缺点是可能会导致局部最优决策。多智能体学习在机器人、智能交通、智能家居等领域具有广泛的应用前景。
独立学习:直接忽略环境中参与动态的其他个体,或者为他们指定默认策略,或者假定他们的动作为最优值;不能解决非平稳性带来的缺点包括在复杂环境中表现欠佳,并可能出现对其他智能体策略的过拟合。多智能体环境的非平稳性:对于MAS中的任意单一智能体,环境状态的转移不再仅仅依赖于自己的动作与环境的动态,还依赖于其他智能体所采取的动作,这就造成了环境的非平稳性。(在单智能体环境中,处于状态s的agent采取动作a,转移到状态s'的概率是固定的,而多智能体环境无法保证这一点)
-
-
- 标签:
-
加入的知识群:
.jpg)
学习元评论 (0条)
聪明如你,不妨在这 发表你的看法与心得 ~